CE 4 something Fall 2023
Lab 1 Reverse Engineering Burner Alert - Part 1
Name: Mason
Brady Email:
mrbrady1@fortlewis.edu
Arduino Recreation Task 1: Use
an Arduino UNO board to communicate with an MPU6050 sensor module and
read Acceleration and Gyroscope data:
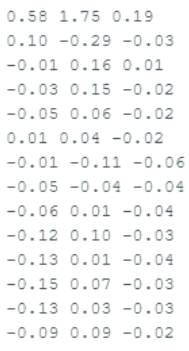
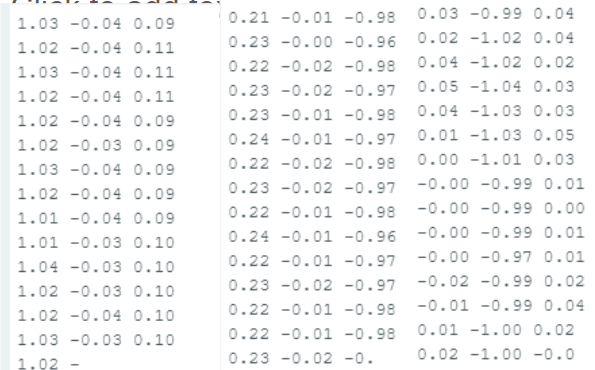
Figure 1. Picking up and gently dropping MPU6050 gyroscope readings
Figure 2. Acceleration Readings
Task 2: Use
a complimentary filter to read the MPU6050 angle
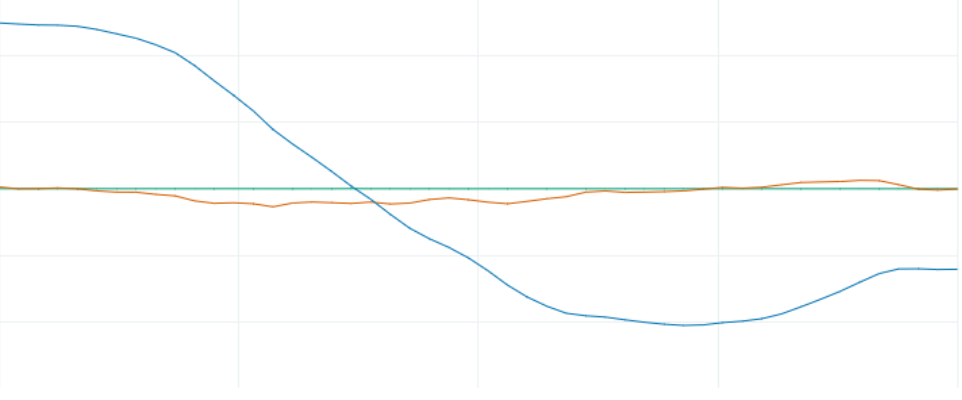
Figure 3. Blue - MPU 6050 angle (complimentary filter), Green
(Acceleration), Orange (Gyroscope)
The green line doesn't appear to move because the change is very subtle
(0 - 1g) compared to the blue line, when zooming in or observing via
serial monitor there is a change.
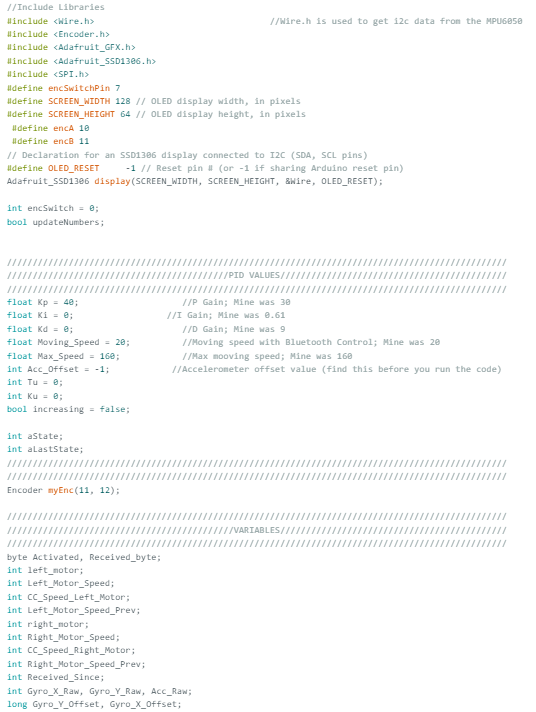
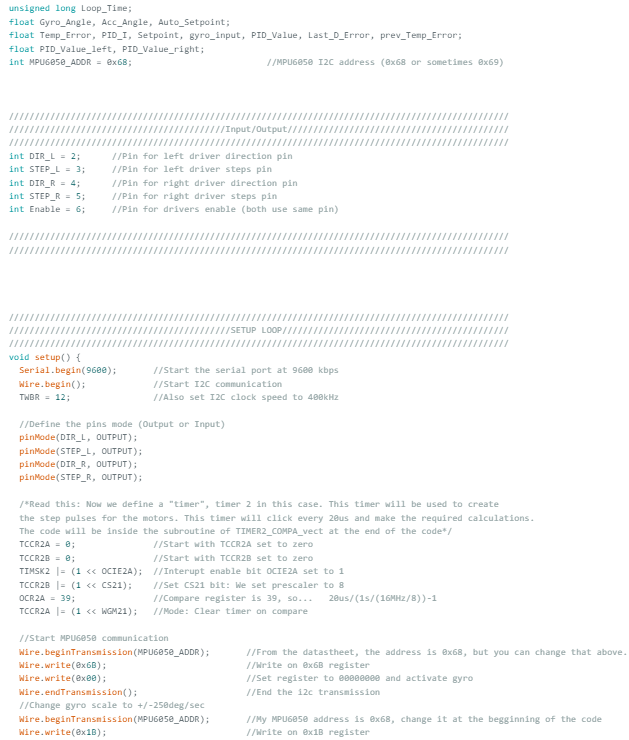
Task 3: Develop
PID controller for the Tumbller
Figure 4. Video of Tumbller using modified version of Calvin's code
(The battery level was quite low so it was less stable than before)
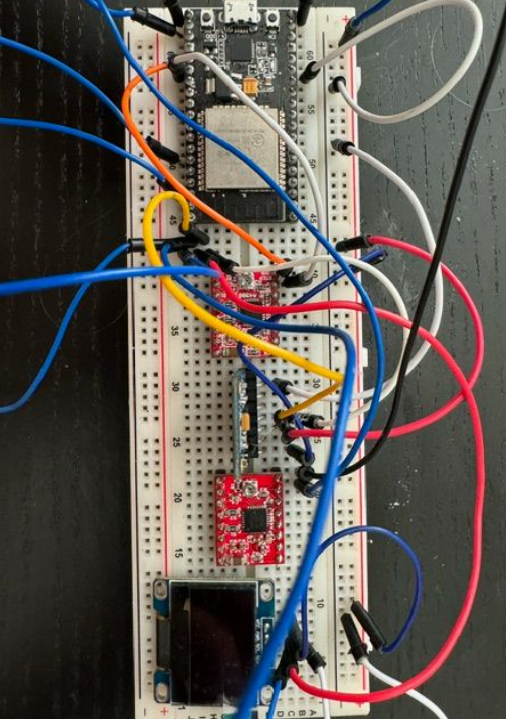
Task 4: Build a balancing robot using the NEMA17 motor driver. Figure 5. Robot Wiring
Task 5: Use
an encoder to tune the PID parameters:
Figure 6. Encoder tuning for Kp and Ziegler-Nichols calculations. Task 6: Design
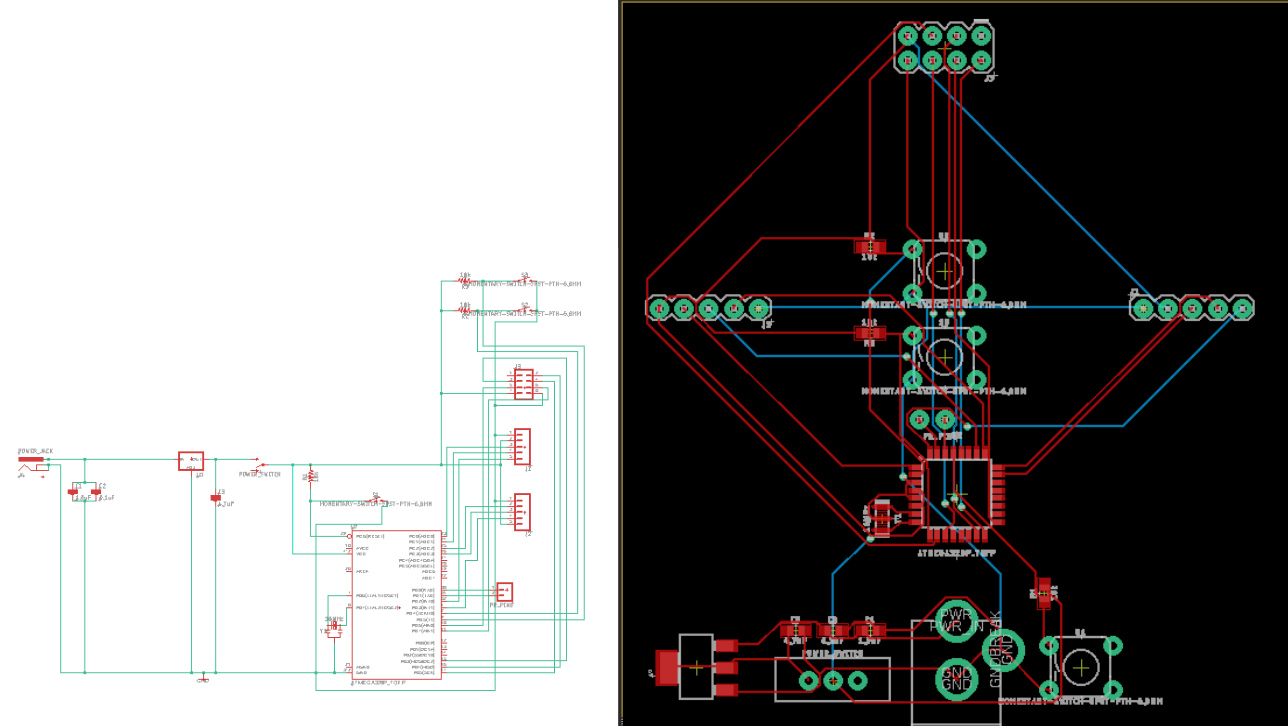
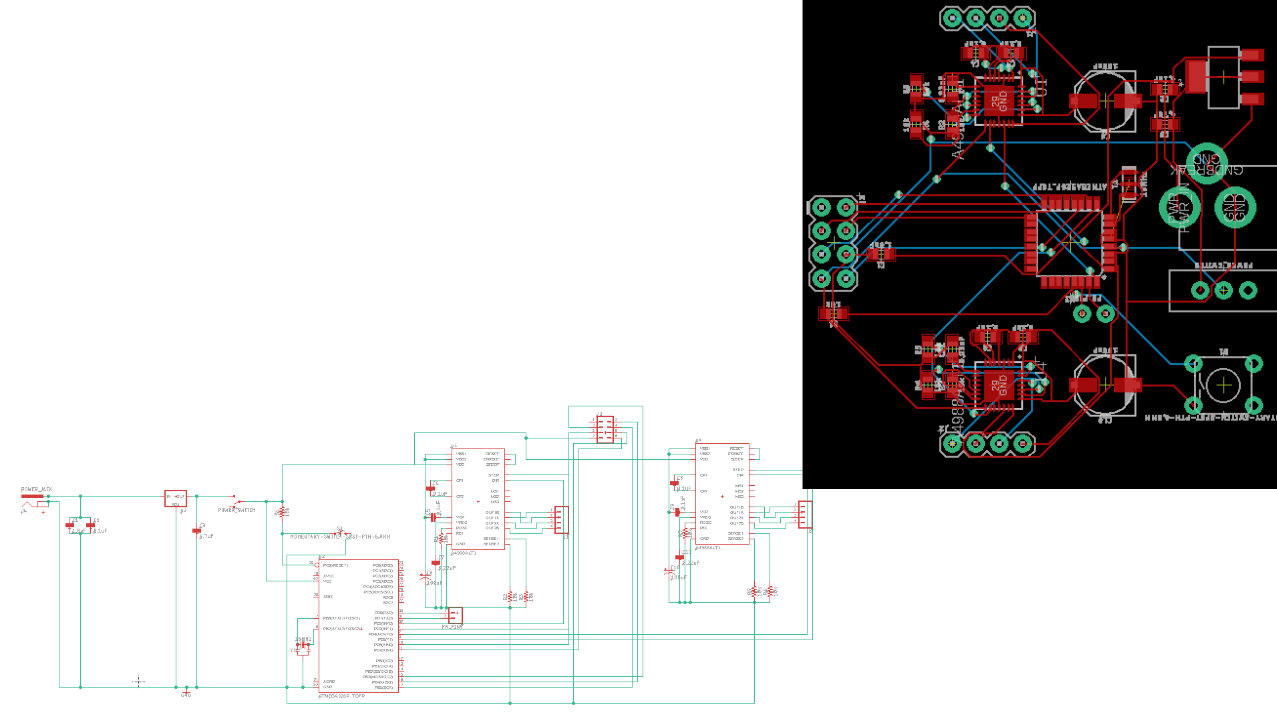
the PCB for the remote and car:
Figure 7. PCB Remote Design
Figure 8. PCB Robot Design