CE 351 2020 Fall
Lab 5: PIDs
Nic Theobald
nstheobald@fortlewis.edu
PID Control with LED and Photoresistor
Introduction
PID
control is a widely used method in control systems. It can be
used to sample the current value, calculate the error between the
current value and the desired value, and then attempt to correct the
error. In this experiment, a LED and Photoresistor is used to maintain
a constant light intensity. The experiment started with the framework
of the system, with minimal tuning, and ended with a more refined
version of the system. The final version of the system allows for
custom setpoint tracking using a pushbutton, serial input, and a
potentiometer.
Methods and Materials
Item
Quantity
Arduino IDE
Arduino UNO
LED
LDR
Push Button
10k Pull down resistor
200 ohm resistor
1
1
1
1
1
1
2
The first step to developing a PID system is determining the boundary
conditions of the systems. The high point of the system was determined
by completely turning the LED on and measuring the voltage at the LDR
voltage divider. The low point was determined using a similar process
except turning the LED complete off. The setpoint was determined by
finding the midpoint between the high and low value. The setpoint could
also be manually set anywhere between the high and low values. The
system was tuned in order to reduce noise and overshoot. A pushbutton,
potentiometer, and serial input was used to manually set the setpoint
and investigate the effectivness of the system.
Results
Task 1: Basic PID System
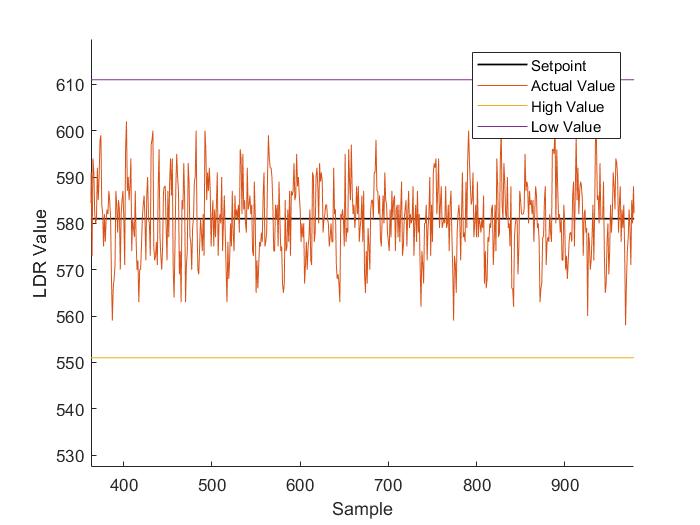
A basic system was built and programmed. Minimal tuning was
performed where the P coefficient was set to 0.03. I coefficient set to
1 to get the signal to oscillate around the set
point. The video below demonstrates the system in real time. The High
and Low lines in the plot are the systems high and low illumination
values. The system automatically determines the setpoint every time it
is reset and the plot is updated.
Figure 1: System automatically determining the setpoint and then oscillating around setpoint.
Task 2: Tuning the PID System
The system was better tuned and distrubences were introduced to test the systems correction abilities.
Figure 3: System reacting to outside disturbances.
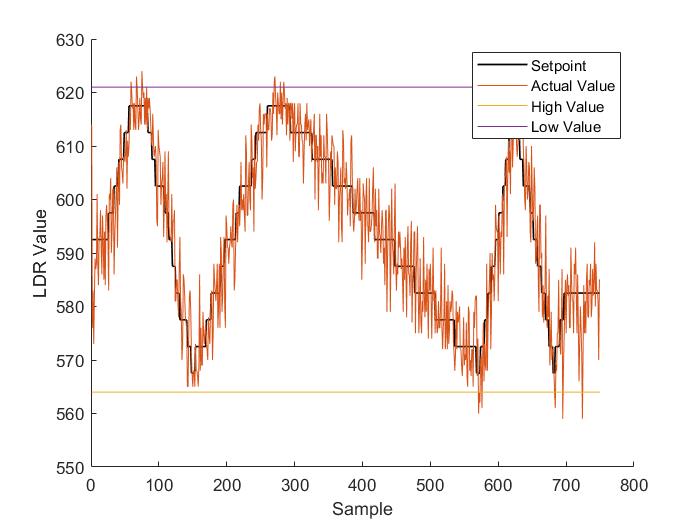
Task 3:Custom set points
The system was tuned using realtime serial input by adjusting
the coefficients and seeing how the system reacts. Similarly, serial
input, a push button, or a potentiometer could be added for realtime
setpoint setting.
Figure 4: Setting the setpoint in realtime using Serial Input.
Figure 6: Setting the setpoint in realtime using a Potentiometer.
Figure 7: Setting the setpoint in realtime using a pushbutton.
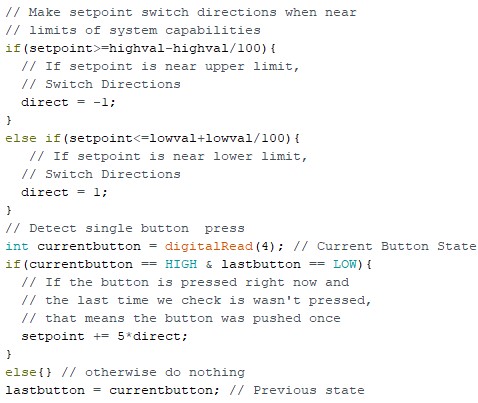
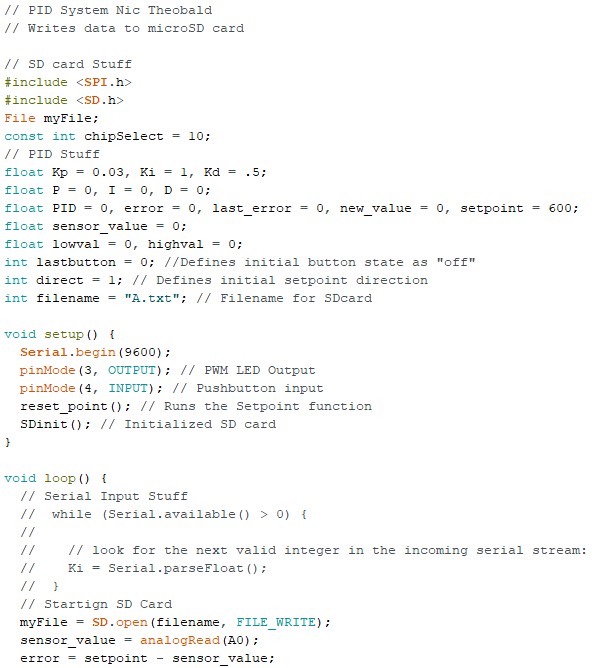
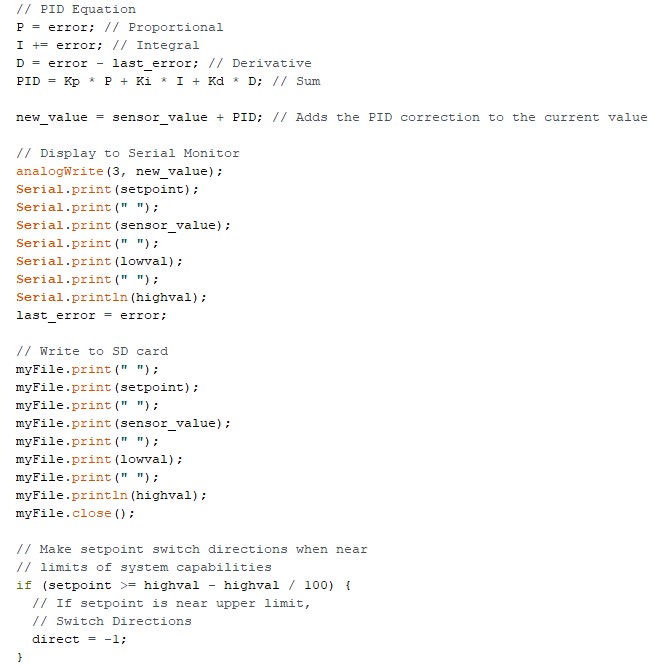
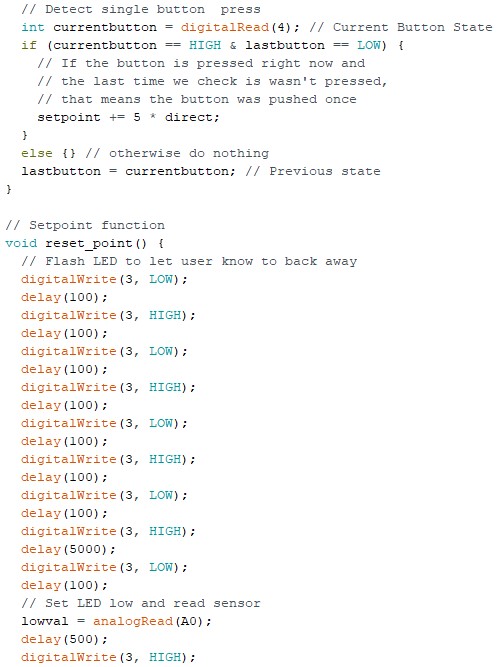
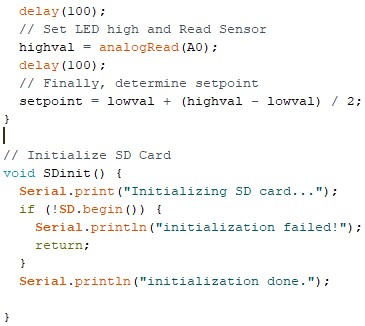
Finished Code:
Discussion:
This lab experimented with a basic PID system. The system was
tuned in order to reduce noise and maximize the systems correction
speed while reducing overshoot. A pushbutton, serial input, and a
potentiometer was used to set the systems setpoint.